NVIDIA Cosmos and DGX Spark Bring Physical AI Closer to Developers
NVIDIA's Cosmos world foundation model platform and DGX Spark workstation point toward the same shift: physical AI is moving from distant lab infrastructure into developer workflows. Cosmos focuses on world models for robotics, autonomous systems, and simulation. DGX Spark puts serious local AI compute on a desk. Together, they make it easier to prototype systems that need perception, planning, and synthetic environments.
Why World Models Matter
Robots and autonomous machines need more than language. They need a representation of how the physical world changes over time: objects move, surfaces collide, lighting shifts, and actions have consequences. Cosmos is designed around that need, giving developers a base for generating and adapting world models before testing policies in real or simulated environments.
This matters because real-world data is expensive, risky, and slow to collect. A good simulation loop lets teams explore edge cases, validate policies, and generate training material before hardware is exposed to dangerous scenarios.
Why Local AI Workstations Are Back
Cloud training will remain essential, but local inference and fine-tuning are becoming practical again. DGX Spark-class systems target developers who need to run larger models, robotics stacks, retrieval pipelines, and synthetic-data experiments close to their code and devices.
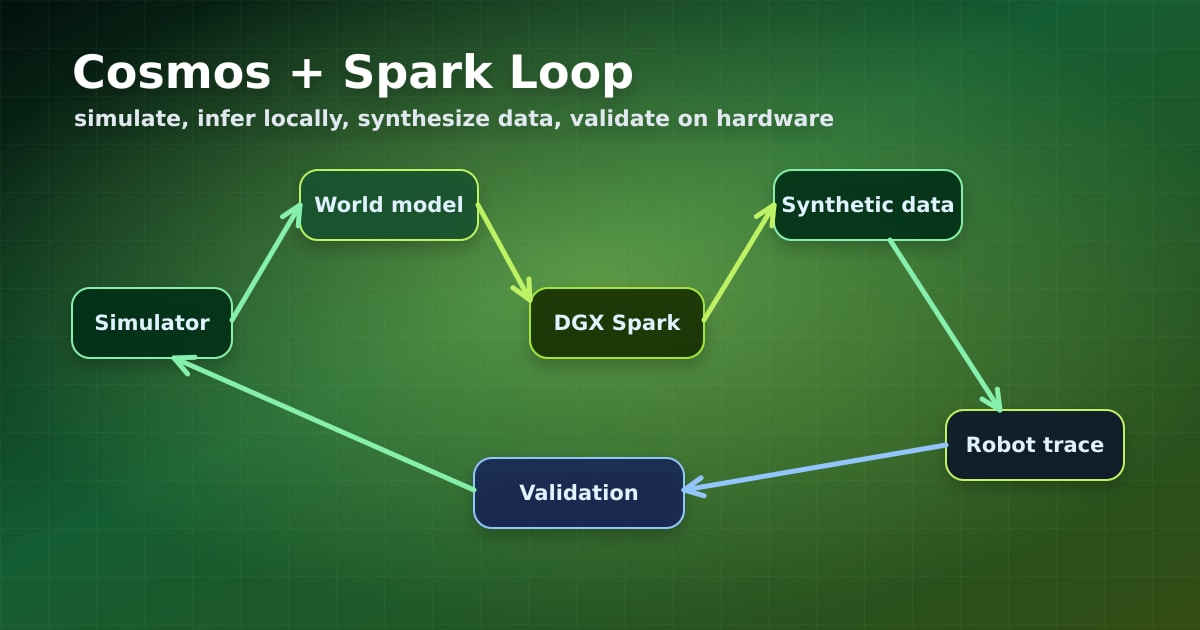
Caption: Physical AI development combines simulation, local inference, synthetic data, and hardware feedback.
For robotics and edge AI teams, local compute also reduces iteration latency. You can test a perception model, replay a sensor trace, adjust prompts or policies, and inspect outputs without waiting for a remote queue.
Engineering Tip: Separate Simulation Truth From Model Output
When building with world models, keep a clean boundary between simulator state and generated model output. Treat the simulator as the source of truth for physics, timing, and object identity. Treat the generative model as a proposal engine for scenarios, textures, trajectories, or likely next states.
Log every synthetic sample with seed, model version, simulator version, prompt, and acceptance criteria. Before using generated scenes for training, run validation checks for impossible geometry, missing labels, and distribution drift. Physical AI pipelines fail quietly when synthetic data looks plausible but violates the constraints your robot will face in the real world.
Sources: NVIDIA Cosmos paper, NVIDIA Cosmos GitHub, NVIDIA DGX Spark.
What do you think? Will local AI workstations become standard equipment for robotics teams, or will simulation stay mostly cloud-based?
Ready to organize your knowledge with AI?
BrainMap automatically classifies your notes, discovers connections, and builds your personal knowledge graph. Free to start — no credit card required.
Start for FreeRelated Articles

Agentic Workflow Runtimes Are the New Middleware
Enterprise AI agents need runtimes for state, tools, approvals, lineage, retries, and governance.

Anthropic Fable 5 Turns Model Safety Into an Operations Problem
The Fable 5 dispute shows that frontier model safety now includes export controls, red teams, and operational shutdowns.

Anthropic's IPO Path Shows the Cost of Frontier AI Scale
Anthropic's reported IPO path highlights compute demand, investor pressure, and the business model behind frontier AI.